mirror of
https://github.com/nicolabs/nicobot.git
synced 2025-09-07 05:14:01 +02:00
290 lines
15 KiB
Markdown
290 lines
15 KiB
Markdown
# Devops notes for nicobot
|
||
|
||
[![Build Status on 'master' branch][travisci-shield]][travisci-link] [![PyPi][pypi-shield]][pypi-link]
|
||
[![Build and publish to Docker Hub][dockerhub-shield]][dockerhub-link]
|
||
[![Docker debian][docker-debian-size] ![Docker signal-debian][docker-signal-debian-size] ![Docker alpine][docker-alpine-size]](https://hub.docker.com/r/nicolabs/nicobot/tags)
|
||
|
||
|
||
|
||
## Basic development
|
||
|
||
Install Python dependencies (for both building and running) and generate `nicobot/version.py` with :
|
||
|
||
pip3 install -r requirements-build.txt -r requirements-runtime.txt
|
||
python3 setup.py build
|
||
|
||
To run unit tests :
|
||
|
||
python3 -m unittest discover -v -s tests
|
||
|
||
To run directly from source (without packaging) :
|
||
|
||
python3 -m nicobot.askbot [options...]
|
||
|
||
To build locally (more at [pypi.org](https://packaging.python.org/tutorials/packaging-projects/)) :
|
||
|
||
rm -rf ./dist ; python3 setup.py build sdist bdist_wheel
|
||
|
||
### PyPi upload
|
||
|
||
To upload to test.pypi.org :
|
||
|
||
python3 -m twine upload --repository testpypi dist/*
|
||
|
||
To install the test package from test.pypi.org and check that it works :
|
||
|
||
# First create a virtual environment not to mess with the host system
|
||
python3 -m venv venv/pypi_test && source venv/pypi_test/bin/activate
|
||
|
||
# Then install dependencies using the regular pypi repo
|
||
pip3 install -r requirements-runtime.txt
|
||
|
||
# Finally install this package from the test repo
|
||
pip3 install -i https://test.pypi.org/simple/ --no-deps nicobot
|
||
|
||
# Do some test
|
||
python -m nicobot.askbot -V
|
||
...
|
||
|
||
# Exit the virtual environment
|
||
deactivate
|
||
|
||
To upload to PROD pypi.org :
|
||
|
||
python3 -m twine upload dist/*
|
||
|
||
Both above *twine upload* commands will ask for a username and a password.
|
||
To prevent this, you could set variables :
|
||
|
||
# Defines username and password (or '__token__' and API key)
|
||
export TWINE_USERNAME=__token__
|
||
# Example reading the token from a local 'passwordstore'
|
||
export TWINE_PASSWORD=`pass pypi/test.pypi.org/api_token`
|
||
|
||
Or store them in `~/.pypirc` ([see doc](https://packaging.python.org/specifications/pypirc/)) :
|
||
|
||
[pypi]
|
||
username = __token__
|
||
password = <PyPI token>
|
||
|
||
[testpypi]
|
||
username = __token__
|
||
password = <TestPyPI token>
|
||
|
||
Or even use CLI options `-u` and `-p`, or certificates...
|
||
See `python3 -m twine upload --help` for details.
|
||
|
||
|
||
|
||
### Automation for PyPi
|
||
|
||
The above instructions allow to build manually but otherwise it is automatically tested, built and uploaded to pypi.org using _Travis CI_ on each push to GitHub (see [`.travis.yml`](.travis.yml)).
|
||
|
||
|
||
|
||
## Docker build
|
||
|
||
There are several Dockerfiles, each made for specific use cases (see [README.md](README.md#Docker-usage)).
|
||
They all have [multiple stages](https://docs.docker.com/develop/develop-images/multistage-build/).
|
||
|
||
`debian.Dockerfile` is quite straight. It builds using *pip* in one stage and copies the resulting *wheels* into the final one.
|
||
|
||
`signal-debian.Dockerfile` is more complex because it needs to address :
|
||
- including both Python and Java while keeping the image size small
|
||
- compiling native dependencies (both for _signal-cli_ and _qr_)
|
||
- circumventing a number of bugs in multiarch building
|
||
|
||
`alpine.Dockerfile` produces smaller images but may not be as much portable than debian ones and misses Signal support for now.
|
||
|
||
Note that the _signal-cli_ backend needs a _Java_ runtime environment, and also _rust_ dependencies to support Signal's group V2. This approximately doubles the size of the images and almost ruins the advantage of alpine over debian...
|
||
|
||
Those images are limited on each OS (debian+glibc / alpine+musl) to CPU architectures which :
|
||
1. have base images (python, openjdk, rust)
|
||
2. have Python dependencies have _wheels_ or are able to build them
|
||
3. can build libzkgroup (native dependencies for signal)
|
||
4. have the required packages to build
|
||
|
||
At the time of writing, support is dropped for :
|
||
- `linux/s390x` : lack of _python:3_ image (at least)
|
||
- `linux/riscv64` : lack of _python:3_ image (at least)
|
||
- Signal backend on `linux/arm*` _for Alpine variants_ : lack of JRE binaries
|
||
|
||
All images have all the bots inside (as they would otherwise only differ by one script from each other).
|
||
The [`docker-entrypoint.sh`](docker/docker-entrypoint.sh) script takes the name of the bot to invoke as its first argument, then its own options and finally the bot's arguments.
|
||
|
||
Sample _build_ command (single architecture) :
|
||
|
||
docker build -t nicolabs/nicobot:debian -f debian.Dockerfile .
|
||
|
||
Sample _buildx_ command (multi-arch) :
|
||
|
||
docker buildx build --platform linux/amd64,linux/arm64,linux/386,linux/arm/v7 -t nicolabs/nicobot:debian -f debian.Dockerfile .
|
||
|
||
Then run with the provided sample configuration :
|
||
|
||
docker run --rm -it -v "$(pwd)/tests:/etc/nicobot" nicolabs/nicobot:debian askbot -c /etc/nicobot/askbot-sample-conf/config.yml
|
||
|
||
|
||
### Automation for Docker Hub
|
||
|
||
_Github actions_ are currently used (see [`.github/workflows/dockerhub.yml`](.github/workflows/dockerhub.yml) to automatically build and push the images to [Docker Hub](https://hub.docker.com/r/nicolabs/nicobot) so they are available whenever commits are pushed to the _master_ branch :
|
||
|
||
1. A *Github Action* is triggered on each push to [the central repo](https://github.com/nicolabs/nicobot)
|
||
2. Alpine images and Debian images are built in parallel to speed up things. Debian-signal is built after Debian. Caching is used for both. See [.github/workflows/dockerhub.yml](.github/workflows/dockerhub.yml).
|
||
3. Images are uploaded to [Docker Hub](https://hub.docker.com/repository/docker/nicolabs/nicobot)
|
||
|
||
#### Tagging strategy
|
||
|
||
Since I could not find an easy way to generate exactly the tags I wanted, the `setup.py` script embeds a custom command to generate them from the git context (tag, commit) and the image variant :
|
||
|
||
- [docker/github-actions](https://github.com/docker/github-actions) tagging strategy does not explicitely allows to tag with *latest* an image of choice (I may be able to force it by tagging the wanted image in the end but it does not look 100% sure)
|
||
- [crazy-max/ghaction-docker-meta](https://github.com/crazy-max/ghaction-docker-meta) is quite complex to understand and I could not figure out a way to implement my strategy
|
||
- See [setup.py#DockerTagsCommand](setup.py#DockerTagsCommand) for the custom solution
|
||
|
||
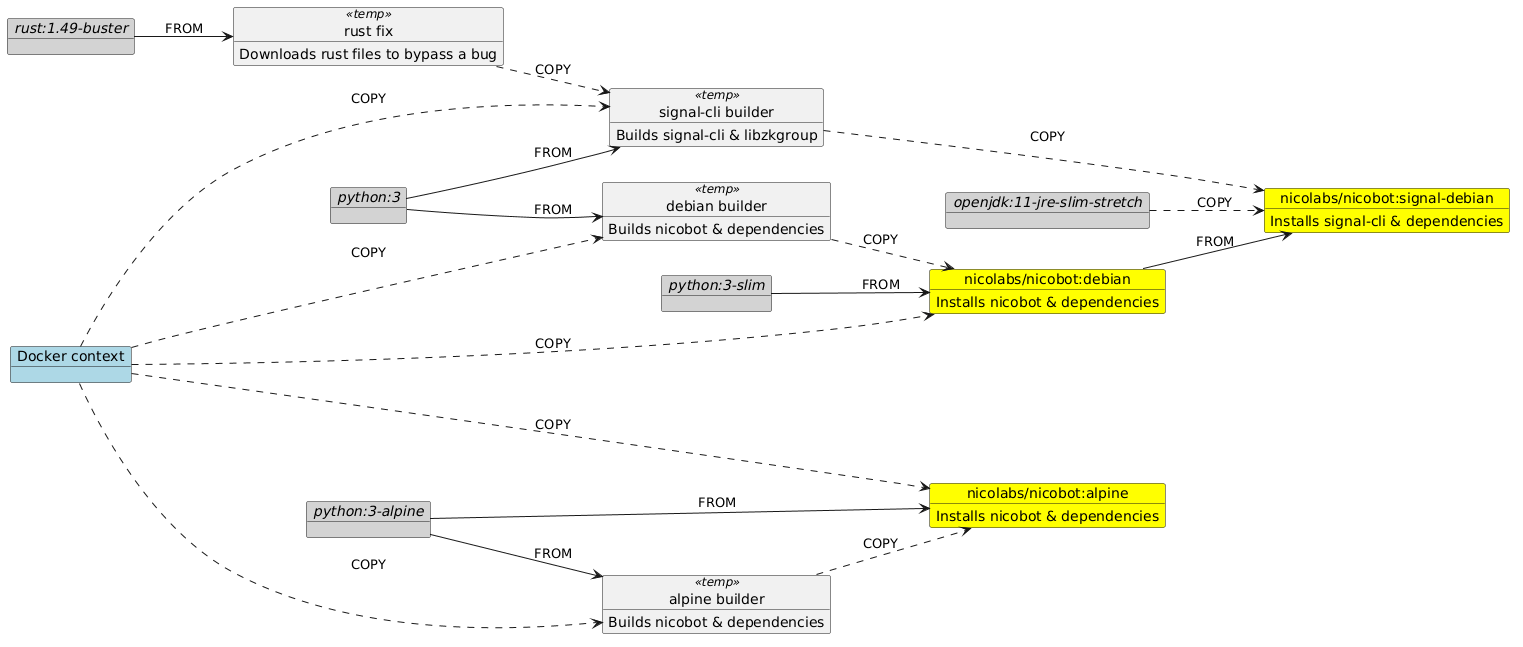
### Docker build process overview
|
||
|
||
This diagram is the view from the **master** branch on this repository.
|
||
It emphasizes *FROM* and *COPY* relations between the images (base and stages).
|
||
|
||
|
||
|
||
|
||
### Why no image is available for x arch ?
|
||
|
||
[The open issues labelled with *docker*](https://github.com/nicolabs/nicobot/labels/docker) should reference the reasons for missing arch / configuration.
|
||
|
||
|
||
### Docker image structure
|
||
|
||
Here are the main application files and directories from within the images :
|
||
|
||
📦 /
|
||
┣ 📂 etc/nicobot/ - - - - - - - - - - - -> Default configuration files
|
||
┃ ┣ 📜 config.yml
|
||
┃ ┣ 📜 i18n.en.yml
|
||
┃ ┗ 📜 ...
|
||
┣ 📂 root/
|
||
┃ ┗ 📂 .local/
|
||
┃ ┣ 📂 bin/ - - - - - - - - - - - - - -> Executable commands
|
||
┃ ┃ ┣ 📜 askbot
|
||
┃ ┃ ┣ 📜 docker-entrypoint.sh
|
||
┃ ┃ ┣ 📜 transbot
|
||
┃ ┃ ┗ 📜 ...
|
||
┃ ┗ 📂 lib/pythonX.X/site-packages/ - -> Python packages (nicobot & dependencies)
|
||
┗ 📂 var/nicobot/ - - - - - - - - - - - -> Custom configuration files & data (contains secret stuff !)
|
||
┣ 📂 .omemo/ - - - - - - - - - - - - - -> OMEMO keys (XMPP)
|
||
┣ 📂 .signal-cli/ - - - - - - - - - - -> signal-cli configuration files
|
||
┗ 📜 ...
|
||
|
||
|
||
## Versioning
|
||
|
||
The `--version` command-line option that displays the bots' version relies on _setuptools_scm_, which extracts it from the underlying git metadata.
|
||
This is convenient because the developer does not have to manually update the version (or forget to do it), however it either requires the version to be fixed inside a Python module or the `.git` directory to be present.
|
||
|
||
There were several options among which the following one has been retained :
|
||
1. Running `setup.py` creates / updates the version inside the `version.py` file
|
||
2. The scripts then load this module at runtime
|
||
|
||
Since the `version.py` file is not saved into the project, `setup.py build` must be run before the version can be queried. In exchange :
|
||
- it does not require _setuptools_ nor _git_ at runtime
|
||
- it frees us from having the `.git` directory around at runtime ; this is especially useful to make the docker images smaller
|
||
|
||
Tip : `python3 setup.py --version` will print the guessed version.
|
||
|
||
|
||
|
||
## Building signal-cli
|
||
|
||
The _signal_ backend (actually *signal-cli*) requires a Java runtime, which approximately doubles the image size.
|
||
This led to build separate images (same _repo_ but different _tags_), to allow using smaller images when only the XMPP backend is needed.
|
||
|
||
|
||
|
||
## Resources
|
||
|
||
### IBM Cloud
|
||
|
||
- [Language Translator service](https://cloud.ibm.com/catalog/services/language-translator)
|
||
- [Language Translator API documentation](https://cloud.ibm.com/apidocs/language-translator)
|
||
|
||
### Signal
|
||
|
||
- [Signal home](https://signal.org/)
|
||
- [signal-cli man page](https://github.com/AsamK/signal-cli/blob/master/man/signal-cli.1.adoc)
|
||
|
||
### Jabber
|
||
|
||
- Official XMPP libraries : https://xmpp.org/software/libraries.html
|
||
- OMEMO compatible clients : https://omemo.top/
|
||
- [OMEMO official Python library](https://github.com/omemo/python-omemo) : looks very immature
|
||
- *Gaijim*, a Windows/MacOS/Linux XMPP client with OMEMO support : [gajim.org](https://gajim.org/) | [dev.gajim.org/gajim](https://dev.gajim.org/gajim)
|
||
- *Conversations*, an Android XMPP client with OMEMO support and paid hosting : https://conversations.im
|
||
|
||
### Python libraries
|
||
|
||
- [xmpppy](https://github.com/xmpppy/xmpppy) : this library is very easy to use but it does allow easy access to thread or timestamp, and no OMEMO...
|
||
- [github.com/horazont/aioxmpp](https://github.com/horazont/aioxmpp) : officially referenced library from xmpp.org, seems the most complete but misses practical introduction and [does not provide OMEMO OOTB](https://github.com/horazont/aioxmpp/issues/338).
|
||
- [slixmpp](https://lab.louiz.org/poezio/slixmpp) : seems like a cool library too and pretends to require minimal dependencies ; plus it [supports OMEMO](https://lab.louiz.org/poezio/slixmpp-omemo/) so it's the winner. [API doc](https://slixmpp.readthedocs.io/).
|
||
|
||
### Dockerfile
|
||
|
||
- [Best practices for writing Dockerfiles](https://docs.docker.com/develop/develop-images/dockerfile_best-practices/)
|
||
- [Docker development best practices](https://docs.docker.com/develop/dev-best-practices/)
|
||
- [DEBIAN_FRONTEND=noninteractive trick](https://serverfault.com/questions/500764/dpkg-reconfigure-unable-to-re-open-stdin-no-file-or-directory)
|
||
- [Dockerfile reference](https://docs.docker.com/engine/reference/builder/#copy)
|
||
|
||
### JRE + Python in Docker
|
||
|
||
- [Docker hub - python images](https://hub.docker.com/_/python)
|
||
- [docker-library/openjdk - ubuntu java package has broken cacerts](https://github.com/docker-library/openjdk/issues/19)
|
||
- [Openjdk Dockerfiles @ github](https://github.com/docker-library/openjdk)
|
||
- [phusion/baseimage-docker @ github - not used in the end, because not so portable](https://github.com/phusion/baseimage-docker)
|
||
- [Azul JDK - not used in the end because not better than openjdk](http://docs.azul.com/zulu/zuludocs/ZuluUserGuide/PrepareZuluPlatform/AttachAPTRepositoryUbuntuOrDebianSys.htm)
|
||
- [rappdw/docker-java-python image - not used because only for amd64](https://hub.docker.com/r/rappdw/docker-java-python)
|
||
- [Use OpenJDK builds provided by jdk.java.net?](https://github.com/docker-library/openjdk/issues/212)
|
||
- [How to install tzdata on a ubuntu docker image?](https://serverfault.com/questions/949991/how-to-install-tzdata-on-a-ubuntu-docker-image)
|
||
|
||
### Multiarch & native dependencies
|
||
|
||
- [docker.com - Automatic platform ARGs in the global scope](https://docs.docker.com/engine/reference/builder/#automatic-platform-args-in-the-global-scope)
|
||
- [docker/buildx @ github](https://github.com/docker/buildx)
|
||
- [Compiling 'crytography' for Python](https://cryptography.io/en/latest/installation.html#building-cryptography-on-linux)
|
||
- [signal-cli - Providing native lib for libsignal](https://github.com/AsamK/signal-cli/wiki/Provide-native-lib-for-libsignal)
|
||
- [github.com/signalapp/zkgroup - Compiling on raspberry pi fails](https://github.com/signalapp/zkgroup/issues/6)
|
||
- [Multi-Platform Docker Builds (including cargo-specific cross-building)](https://www.docker.com/blog/multi-platform-docker-builds/)
|
||
- [How to build ARMv6 and ARMv7 in the same manifest file. (Compatible tag for ARMv7, ARMv6, ARM64 and AMD64)](https://github.com/KEINOS/Dockerfile_of_Alpine/issues/3)
|
||
- [The "dpkg-split: No such file or directory" bug](https://github.com/docker/buildx/issues/495)
|
||
- [The "Command '('lsb_release', '-a')' returned non-zero exit status 1" bug](https://github.com/docker/buildx/issues/493)
|
||
- [Binfmt / Installing emulators](https://github.com/tonistiigi/binfmt#installing-emulators)
|
||
- [Cross-Compile for Raspberry Pi With Docker](https://itsze.ro/blog/2020/11/29/cross-compile-for-raspberry-pi-with-docker.html)
|
||
|
||
### Python build & Python in Docker
|
||
|
||
- [Packaging Python Projects](https://packaging.python.org/tutorials/packaging-projects/)
|
||
- [What Are Python Wheels and Why Should You Care?](https://realpython.com/python-wheels)
|
||
- [Using Alpine can make Python Docker builds 50× slower](https://pythonspeed.com/articles/alpine-docker-python/)
|
||
- [pip install manual](https://pip.pypa.io/en/stable/reference/pip_install/)
|
||
- [pip is showing error 'lsb_release -a' returned non-zero exit status 1](https://stackoverflow.com/questions/44967202/pip-is-showing-error-lsb-release-a-returned-non-zero-exit-status-1)
|
||
|
||
### Rust
|
||
|
||
- [Compiling with rust](https://www.rust-lang.org/tools/install)
|
||
- [Packaging a Rust web service using Docker](https://blog.logrocket.com/packaging-a-rust-web-service-using-docker/)
|
||
- [docker/buildx - Value too large for defined data type](https://github.com/docker/buildx/issues/395)
|
||
|
||
|
||
|
||
<!-- MARKDOWN LINKS & IMAGES ; thks to https://github.com/othneildrew/Best-README-Template -->
|
||
<!-- https://www.markdownguide.org/basic-syntax/#reference-style-links -->
|
||
|
||
[travisci-shield]: https://travis-ci.com/nicolabs/nicobot.svg?branch=master
|
||
[travisci-link]: https://travis-ci.com/nicolabs/nicobot
|
||
[pypi-shield]: https://img.shields.io/pypi/v/nicobot?label=pypi
|
||
[pypi-link]: https://pypi.org/project/nicobot
|
||
[dockerhub-shield]: https://github.com/nicolabs/nicobot/workflows/Docker%20Hub/badge.svg
|
||
[dockerhub-link]: https://hub.docker.com/r/nicolabs/nicobot
|
||
[docker-signal-debian-size]: https://img.shields.io/docker/image-size/nicolabs/nicobot/signal-debian.svg?label=signal-debian
|
||
[docker-debian-size]: https://img.shields.io/docker/image-size/nicolabs/nicobot/debian.svg?label=debian
|
||
[docker-alpine-size]: https://img.shields.io/docker/image-size/nicolabs/nicobot/alpine.svg?label=alpine
|